دنیای علم و تکنولوژی
اخبار و مقالات مربوط به دنیای علم و تکنولوژی ترجمه شده از منابع معتبردنیای علم و تکنولوژی
اخبار و مقالات مربوط به دنیای علم و تکنولوژی ترجمه شده از منابع معتبردرباره من
 وبلاگ رسمی اصغر ناصری
این وبلاگ با هدف ارائه مطالب آموزشی تهیه می شود و قصد دارد به دانشنامه کوچکی از علوم و فنون تبدیل گردد.
ادامه...
وبلاگ رسمی اصغر ناصری
این وبلاگ با هدف ارائه مطالب آموزشی تهیه می شود و قصد دارد به دانشنامه کوچکی از علوم و فنون تبدیل گردد.
ادامه...
دستهها
- تصاویر جالب علمی 60
- اخبار علمی 116
- تاریخ علم 21
- مقالات علمی 187
- حقایق علمی 29
- پرسش و پاسخ علمی 4
- تکنولوژی نظامی 170
- مشاهیر 11
- معرفی وبسایت علمی 10
- سخن بزرگان 4
- تفریح و سرگرمی 1
- شگفتیهای طبیعت 6
- مسابقه علمی 6
- زبان انگلیسی 18
- دیرین شناسی 35
- مهندسی مکانیک 56
- دنیای ریاضیات 54
- فایل های قابل دانلود 8
- پزشکی و سلامت 88
- ترین ها 38
- کنکور 1390 14
- نمونه سوال امتحانی و آزمون 20
- معرفی نرم افزار 4
- واژه نامههای تخصصی 1
- آزمایش های ساده و جالب فیزیک 4
- کنکور 13
- تکنولوژی نفت و حفاری 5
- بانک مقالات علمی 3
- آیرودینامیک و پرواز 6
- استانداردهای مهندسی 6
- محیط زیست 39
- باستان شناسی 5
- پروژه درسی و سمینار 5
- برنامه نویسی کامپیوتر 11
- رپرتاژ آگهی 1
ابر برجسب
کووید 19 کرونا ویروس ریاضیات جنگنده هواپیما ستاره زمین لرزه گرمایش جهانی F-35 موشک کنکور بمب افکن سیاهچاله جنگ جهانی دومبرگهها
جدیدترین یادداشتها
همه- کوارک ها: اجزای سازنده ماده
- آموزش زبان برنامه نویسی پایتون با مثال
- سمی ترین حیوانات طبیعت
- کهن ترین مجسمه ساخت انسان
- راه حل اویلر برای مساله بازل
- ژنتیک: چگونه ویژگیهای خود را از نیاکان به ارث میبریم؟
- برنارد ریمان، آفریدگار هندسه نا اقلیدسی
- ابتذال چیست؟ ریشه آن کدام است؟
- اتمها از کجا آمدهاند؟
- پیری: با گذشت عمر چه اتفاقی برای بدن می افتد؟
- مسایل حل شده از معادلات دیفرانسیل
- لئونارد اویلر
- بخشهای مختلف هواپیما و کارکرد آنها
- انسان بر لبه انقراض
- ساخت بزرگترین هواپیمای حامل پهباد توسط چین
بایگانی
- آبان 1404 2
- مهر 1404 3
- شهریور 1404 3
- مرداد 1404 2
- تیر 1404 2
- خرداد 1404 3
- اردیبهشت 1404 1
- فروردین 1404 1
- اسفند 1403 1
- بهمن 1403 2
- دی 1403 1
- آذر 1403 1
- مهر 1403 1
- شهریور 1403 3
- مرداد 1403 1
- تیر 1403 3
- خرداد 1403 4
- اردیبهشت 1403 3
- فروردین 1403 2
- اسفند 1402 7
- بهمن 1402 2
- دی 1402 3
- آذر 1402 3
- آبان 1402 2
- مهر 1402 5
- شهریور 1402 4
- مرداد 1402 12
- تیر 1402 12
- خرداد 1402 5
- اردیبهشت 1402 6
- فروردین 1402 8
- اسفند 1401 6
- بهمن 1401 9
- دی 1401 2
- آذر 1401 3
- آبان 1401 1
- مهر 1401 1
- شهریور 1401 4
- مرداد 1401 7
- تیر 1401 12
- خرداد 1401 10
- اردیبهشت 1401 12
- فروردین 1401 4
- اسفند 1400 4
- بهمن 1400 7
- دی 1400 2
- آبان 1400 5
- مهر 1400 9
- شهریور 1400 1
- مرداد 1400 3
- تیر 1400 6
- خرداد 1400 7
- اردیبهشت 1400 8
- فروردین 1400 7
- اسفند 1399 12
- بهمن 1399 11
- دی 1399 1
- آذر 1399 7
- آبان 1399 2
- مهر 1399 1
- اردیبهشت 1399 7
- فروردین 1399 33
- اسفند 1398 13
- بهمن 1398 9
- دی 1398 1
- خرداد 1398 4
- اردیبهشت 1398 7
- بهمن 1397 5
- دی 1397 5
- آذر 1397 2
- آبان 1397 3
- مهر 1397 3
- شهریور 1397 1
- مرداد 1397 7
- تیر 1397 7
- خرداد 1397 2
- اردیبهشت 1397 6
- اسفند 1396 3
- بهمن 1396 5
- دی 1396 4
- آذر 1396 8
- آبان 1396 6
- مهر 1396 5
- شهریور 1396 6
- مرداد 1396 10
- تیر 1396 9
- خرداد 1396 5
- اردیبهشت 1396 3
- فروردین 1396 8
- اسفند 1395 3
- بهمن 1395 3
- دی 1395 1
- آذر 1395 4
- آبان 1395 2
- مهر 1395 7
- شهریور 1395 5
- مرداد 1395 1
- تیر 1395 3
- خرداد 1395 1
- اردیبهشت 1395 1
- فروردین 1395 3
- اسفند 1394 8
- بهمن 1394 2
- دی 1394 1
- آذر 1394 3
- آبان 1394 2
- مهر 1394 1
- مرداد 1394 1
- تیر 1394 2
- فروردین 1394 1
- اسفند 1393 4
- بهمن 1393 2
- دی 1393 1
- آبان 1393 1
- شهریور 1393 1
- مرداد 1393 1
- تیر 1393 3
- اردیبهشت 1393 7
- فروردین 1393 1
- اسفند 1392 2
- بهمن 1392 8
- دی 1392 6
- آذر 1392 16
- آبان 1392 14
- مهر 1392 19
- شهریور 1392 17
- مرداد 1392 6
- تیر 1392 2
- خرداد 1392 5
- اردیبهشت 1392 9
- فروردین 1392 1
- اسفند 1391 5
- بهمن 1391 8
- دی 1391 6
- آذر 1391 8
- آبان 1391 5
- مهر 1391 12
- شهریور 1391 7
- مرداد 1391 2
- تیر 1391 6
- خرداد 1391 7
- اردیبهشت 1391 8
- فروردین 1391 13
- اسفند 1390 7
- بهمن 1390 6
- دی 1390 11
- آذر 1390 2
- آبان 1390 6
- مهر 1390 4
- شهریور 1390 5
- مرداد 1390 8
- تیر 1390 15
- خرداد 1390 25
- اردیبهشت 1390 11
- فروردین 1390 1
- اسفند 1389 13
- بهمن 1389 12
- دی 1389 5
- آذر 1389 3
- آبان 1389 6
- مهر 1389 7
- شهریور 1389 6
- خرداد 1389 1
- اردیبهشت 1389 3
- اسفند 1388 7
- بهمن 1388 10
- دی 1388 11
- آذر 1388 7
- آبان 1388 17
- آذر 1387 1
- آبان 1387 9
- مهر 1387 5
- شهریور 1387 1
- مرداد 1387 3
- تیر 1387 7
- خرداد 1387 5
- اردیبهشت 1387 1
- فروردین 1387 3
- اسفند 1386 3
- بهمن 1386 9
- دی 1386 19
- آذر 1386 19
- آبان 1386 7
تقویم
آبان 1404| ش | ی | د | س | چ | پ | ج |
| 1 | 2 | |||||
| 3 | 4 | 5 | 6 | 7 | 8 | 9 |
| 10 | 11 | 12 | 13 | 14 | 15 | 16 |
| 17 | 18 | 19 | 20 | 21 | 22 | 23 |
| 24 | 25 | 26 | 27 | 28 | 29 | 30 |
جستجو
مقدمه ای بر روشهای بازرسی و اندازه گیری چرخدنده
گردآوری و تالیف: اصغر ناصری (asna50@yahoo.com)
بازرسی چرخدنده ها در مکان های مختلفی از کارگاه تولید به منظور اصلاح فرایند ساخت گرفته تا آزمایشگاه اندازه گیری برای ارزیابی تحلیلی چرخدنده انجام می شود. بازرسی چرخدنده می تواند در کنترل موارد زیر فایده بخش باشد...
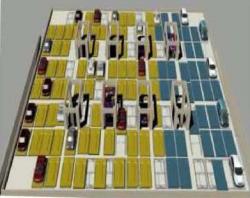
انواع پارکینگ های مکانیزه
محدودیت فضاهای شهری در سالیان اخیر باعث گسترش استفاده از پارکینگ های مکانیزه شده است که امکان پارک خودروها بصورت طبقاتی و بدون دخالت نیروی انسانی را فراهم می سازند. طرحهای بسیار متنوعی در این زمینه وجود دارد و نوآوریهای صنعتی بطور پیوسته محصولات جدیدی به بازار عرضه می کنند. برخی انواع سیستم های مکانیزه پارکینگ را می توان بشرح زیر معرفی کرد:
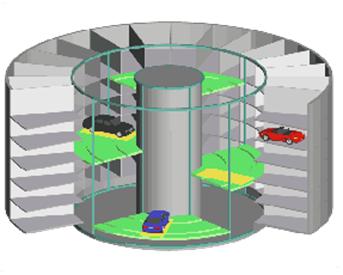
پارکینگ چرخشی برج مانند (Tower-Rotary Type Parking System): که شامل یک مکانیزم چرخنده است که تمامی سیستم و خودروهای پارک شده را در یک حرکت دورانی شرکت می دهد. بارگذاری و تخلیه سیستم از خودرو بصورت چرخهای و در پایین ترین قسمت روی میدهد. از یک سیستم چرخ زنجیر برای ایجاد حرکت دورانی استفاده شده و در هر طبقه دو محل برای پارک خودرو وجود دارد.

پارکینگ ارابهای (Cart type parking System): این سیستم دارای ورودی و خروجیهای متعدد است. یک مکانیزم داخلی سقف پارکینگ های طبقاتی را در امتداد عمودی و افقی جابجا میکند.
سیستم استاکر یا پشتهای (Stacker-type parking System): این سیستم از مکانیزمی روباتیک به نام استاکر استفاده میکند که در مرکز قرار گرفته و خودروها را از آسانسور مرکزی تحویل گرفته یا به درون آن وارد میکند.

سیستم پارکینگ شطرنجی: از یک سیستم بستر غلتنده که در کف پارکینگ تعبیه شده استفاده می شود تا خودروها را در دو جهت X و Y حرکت دهد. در برخی مکانها بالابرهایی نصب شده تا امکان جابجایی عمودی خودرو نیز فراهم شود.
سیستم پارکینگ سه حرکتی : سیستم نقاله امکان جابجایی همزمان در سه بعد را می دهد که باعث کاهش زمان چرخه پارکینگ شده و در عین حال ایمنی بالاتری فراهم می کند. هسته سیستم از یک دیرک استوانهای توخالی تشکیل شده است. سیستم شامل مکانیزمی چرخ و فلک مانند شامل تعدادی سکو با قابلیت جابجایی در راستای عمودی است. هر کدام از سکوهای نقاله بطور عمودی جابجا می شود و شامل سورتمه ای است که بر روی ریلهای افقی حرکت می کند. چرخ و فلک می تواند یک حرکت دورانی پیوسته داشته باشد. هر سکو قابلیت حرکت از پایین ترین نقطه تا بالاترین نقطه را دارد و در این مسیر سورتمه متصل بخود را نیز همراه می برد.
تالیف: اصغر ناصری
مردادماه 1392
محاسبه عدم قطعیت اندازه گیری
مقاله زیر با استفاده از یکی از منابع معتبر در زمینه محاسبه عدم قطعیت آزمونهای اندازه گیری تهیه شده است. برای دانلود روی لینک زیر کلیک کنید.
گردآوری و ترجمه: اصغر ناصری
اندازه گیری درز و ناهمسطحی در بدنه اتومبیل
بازرسی خودروهای تولیدی بخش مهمی از فرایند تولیدی است که شامل معاینه درزهای بین سطوح قطعات خودرو نیز می شود. اندازه گیری درزها بخش مهمی از فرایند مونتاژ خودرو است و توجه زیادی می طلبد، زیرا نواقص موجود قابل مشاهده اند و باعث عایق بندی نامناسب اتاقک سرنشینان و ایجاد صدای زیاد در سرعت های بالا می گردد. در صنعت خودرو این مسئله از اوایل دهه 1980 مورد توجه قرار گرفت، لیکن اندازه گیری درزها هنوز تا حد زیادی بطور دستی انجام می شود و نیروی انسانی و زمان قابل توجهی می طلبد. روش های مورد استفاده برای اندازه گیری درز و ناهمسطحی بین قطعات بدنه خودرو می تواند بصورت زیر رده بندی شود:
....
برای دانلود متن کامل مقاله ابتدا به بخش نظرات در آخرین پست وبلاگ مراجعه کرده و آدرس ایمیل خود را درج کنید. متن مقاله به فاصله کوتاهی برایتان ارسال خواهد شد.
ماشین های اندازه گیری ویدیویی
تهیه و ترجمه: اصغر ناصری

دستگاه های اندازه گیری ویدیویی (VMM) از رده دستگاههای اندازه گیری الکترواپتیکی (برقی-نوری) محسوب می شوند و ابزاری بسیار کارامد برای اندازه گیری دقیق و سریع قطعاتی هستند که خارج از محدوده توانایی CMM ها یا سایه نگارهای دو بعدی قرار می گیرند. اجزای اصلی بکار رفته در این ماشین ها عبارتند از یک دوربین رنگی CCD با قدرت تفکیک بالا، لنزهای زوم پیوسته، مانیتور رنگی، مولد نشانگر ویدیویی، مقیاس خطی دقیق، صفحه نمایش رقومی چندکاره (DRO)، نرم افزار اندازه گیری دو بعدی و میز کاری دقیق.
این ماشین ها اغلب در اندازه گیری دو بعدی و گاهی اوقات سه بعدی بکار می رود و استفاده وسیعی در صنایع ساخت و تولید دقیق مانند قطعات الکترونیکی، قالب های دقیق، ابزار دقیق، فنر، پیچ سازی، قطعات پلاستیکی، شیرهای آب بندی روغنی، اجزای دوربینها و مدارهای چاپی الکترونیکی دارد. این ابزار اکنون به صورت یکی از ملزومات بسیاری از آزمایشگاه های اندازه گیری دقیق درآمده است.
اصول کاری و ساختار چنین ماشینی را می توان با استفاده از شکل زیر توضیح داد:
· قطعه را روی میز ماشین قرار می دهیم.
· منبع نور LED (5) سطح قطعه را روشن می کند.
· لنزهای زوم کننده (16) سطح قطعه را تصویر کرده و دوربین رنگی CCD (واقع در محفظه 20) عکسی از قطعه تولید می کند.
· تصویر قطعه از طریق پایانه S به نمایشگر رنگی (18) منتقل می شود. با حرکت میز در راستای X و Y نشانگر الکترونیکی (17) روی تصویر قطعه قابل جابجایی است و عمل اندازه گیری بر روی تصویر تهیه شده از قطعه با توچه به مقیاس های خطی ماشین انجام می شود.
· اندازه گیری توسط نمایشگر رقومی (2) تکمیل شده و داده های پردازش شده به نمایش در می آید.
بخش های اصلی این دستگاه مطابق شکل زیر عبارتند از:
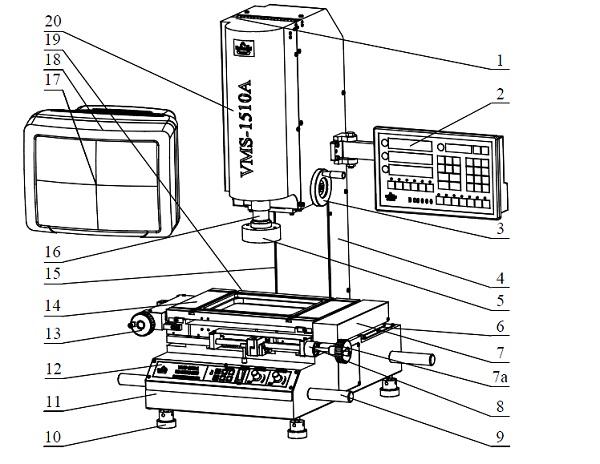
بدنه اصلی
پایه (11)، دیرک (4)، واحد محرک محور Z (3)، میزکاری XY (14) و واحد محرکمحورهای X و Y
سیستم ویدیویی
· لنزهای زوم (16)، گستره کانونی شدن (مانند 0.7 تا 4.5 برابر)، درشت نمایی ویدیویی کل (34 تا 220 برابر)
· دوربین رنگی CCD (درون محفظه 20): تبدیل تصویر نوری تهیه شده توسط لنزهای رزوم به سیگنال الکترونیکی و انتقال سیگنال به نمایشگر رنگی از طریق ترمینال S
· نمایشگر رنگی 15 اینچی (18): سیگنال ارسال شده از دوربین CCD را به تصویر ویدیویی تبدیل می کند.
· مولد نشانگر (15): تولید نشانگر برای هدفگیری و آشکارسازی لبه ها.
· پرتو نور (5): برای تابش نور روی قطعه