دنیای علم و تکنولوژی
اخبار و مقالات مربوط به دنیای علم و تکنولوژی ترجمه شده از منابع معتبردنیای علم و تکنولوژی
اخبار و مقالات مربوط به دنیای علم و تکنولوژی ترجمه شده از منابع معتبردرباره من
 وبلاگ رسمی اصغر ناصری
این وبلاگ با هدف ارائه مطالب آموزشی تهیه می شود و قصد دارد به دانشنامه کوچکی از علوم و فنون تبدیل گردد.
ادامه...
وبلاگ رسمی اصغر ناصری
این وبلاگ با هدف ارائه مطالب آموزشی تهیه می شود و قصد دارد به دانشنامه کوچکی از علوم و فنون تبدیل گردد.
ادامه...
دستهها
- تصاویر جالب علمی 60
- اخبار علمی 116
- تاریخ علم 21
- مقالات علمی 187
- حقایق علمی 29
- پرسش و پاسخ علمی 4
- تکنولوژی نظامی 170
- مشاهیر 11
- معرفی وبسایت علمی 10
- سخن بزرگان 4
- تفریح و سرگرمی 1
- شگفتیهای طبیعت 6
- مسابقه علمی 6
- زبان انگلیسی 18
- دیرین شناسی 35
- مهندسی مکانیک 56
- دنیای ریاضیات 54
- فایل های قابل دانلود 8
- پزشکی و سلامت 88
- ترین ها 38
- کنکور 1390 14
- نمونه سوال امتحانی و آزمون 20
- معرفی نرم افزار 4
- واژه نامههای تخصصی 1
- آزمایش های ساده و جالب فیزیک 4
- کنکور 13
- تکنولوژی نفت و حفاری 5
- بانک مقالات علمی 3
- آیرودینامیک و پرواز 6
- استانداردهای مهندسی 6
- محیط زیست 39
- باستان شناسی 5
- پروژه درسی و سمینار 5
- برنامه نویسی کامپیوتر 11
- رپرتاژ آگهی 1
ابر برجسب
کووید 19 کرونا ویروس ریاضیات جنگنده هواپیما ستاره زمین لرزه گرمایش جهانی F-35 موشک کنکور بمب افکن سیاهچاله جنگ جهانی دومبرگهها
جدیدترین یادداشتها
همه- کوارک ها: اجزای سازنده ماده
- آموزش زبان برنامه نویسی پایتون با مثال
- سمی ترین حیوانات طبیعت
- کهن ترین مجسمه ساخت انسان
- راه حل اویلر برای مساله بازل
- ژنتیک: چگونه ویژگیهای خود را از نیاکان به ارث میبریم؟
- برنارد ریمان، آفریدگار هندسه نا اقلیدسی
- ابتذال چیست؟ ریشه آن کدام است؟
- اتمها از کجا آمدهاند؟
- پیری: با گذشت عمر چه اتفاقی برای بدن می افتد؟
- مسایل حل شده از معادلات دیفرانسیل
- لئونارد اویلر
- بخشهای مختلف هواپیما و کارکرد آنها
- انسان بر لبه انقراض
- ساخت بزرگترین هواپیمای حامل پهباد توسط چین
بایگانی
- آبان 1404 2
- مهر 1404 3
- شهریور 1404 3
- مرداد 1404 2
- تیر 1404 2
- خرداد 1404 3
- اردیبهشت 1404 1
- فروردین 1404 1
- اسفند 1403 1
- بهمن 1403 2
- دی 1403 1
- آذر 1403 1
- مهر 1403 1
- شهریور 1403 3
- مرداد 1403 1
- تیر 1403 3
- خرداد 1403 4
- اردیبهشت 1403 3
- فروردین 1403 2
- اسفند 1402 7
- بهمن 1402 2
- دی 1402 3
- آذر 1402 3
- آبان 1402 2
- مهر 1402 5
- شهریور 1402 4
- مرداد 1402 12
- تیر 1402 12
- خرداد 1402 5
- اردیبهشت 1402 6
- فروردین 1402 8
- اسفند 1401 6
- بهمن 1401 9
- دی 1401 2
- آذر 1401 3
- آبان 1401 1
- مهر 1401 1
- شهریور 1401 4
- مرداد 1401 7
- تیر 1401 12
- خرداد 1401 10
- اردیبهشت 1401 12
- فروردین 1401 4
- اسفند 1400 4
- بهمن 1400 7
- دی 1400 2
- آبان 1400 5
- مهر 1400 9
- شهریور 1400 1
- مرداد 1400 3
- تیر 1400 6
- خرداد 1400 7
- اردیبهشت 1400 8
- فروردین 1400 7
- اسفند 1399 12
- بهمن 1399 11
- دی 1399 1
- آذر 1399 7
- آبان 1399 2
- مهر 1399 1
- اردیبهشت 1399 7
- فروردین 1399 33
- اسفند 1398 13
- بهمن 1398 9
- دی 1398 1
- خرداد 1398 4
- اردیبهشت 1398 7
- بهمن 1397 5
- دی 1397 5
- آذر 1397 2
- آبان 1397 3
- مهر 1397 3
- شهریور 1397 1
- مرداد 1397 7
- تیر 1397 7
- خرداد 1397 2
- اردیبهشت 1397 6
- اسفند 1396 3
- بهمن 1396 5
- دی 1396 4
- آذر 1396 8
- آبان 1396 6
- مهر 1396 5
- شهریور 1396 6
- مرداد 1396 10
- تیر 1396 9
- خرداد 1396 5
- اردیبهشت 1396 3
- فروردین 1396 8
- اسفند 1395 3
- بهمن 1395 3
- دی 1395 1
- آذر 1395 4
- آبان 1395 2
- مهر 1395 7
- شهریور 1395 5
- مرداد 1395 1
- تیر 1395 3
- خرداد 1395 1
- اردیبهشت 1395 1
- فروردین 1395 3
- اسفند 1394 8
- بهمن 1394 2
- دی 1394 1
- آذر 1394 3
- آبان 1394 2
- مهر 1394 1
- مرداد 1394 1
- تیر 1394 2
- فروردین 1394 1
- اسفند 1393 4
- بهمن 1393 2
- دی 1393 1
- آبان 1393 1
- شهریور 1393 1
- مرداد 1393 1
- تیر 1393 3
- اردیبهشت 1393 7
- فروردین 1393 1
- اسفند 1392 2
- بهمن 1392 8
- دی 1392 6
- آذر 1392 16
- آبان 1392 14
- مهر 1392 19
- شهریور 1392 17
- مرداد 1392 6
- تیر 1392 2
- خرداد 1392 5
- اردیبهشت 1392 9
- فروردین 1392 1
- اسفند 1391 5
- بهمن 1391 8
- دی 1391 6
- آذر 1391 8
- آبان 1391 5
- مهر 1391 12
- شهریور 1391 7
- مرداد 1391 2
- تیر 1391 6
- خرداد 1391 7
- اردیبهشت 1391 8
- فروردین 1391 13
- اسفند 1390 7
- بهمن 1390 6
- دی 1390 11
- آذر 1390 2
- آبان 1390 6
- مهر 1390 4
- شهریور 1390 5
- مرداد 1390 8
- تیر 1390 15
- خرداد 1390 25
- اردیبهشت 1390 11
- فروردین 1390 1
- اسفند 1389 13
- بهمن 1389 12
- دی 1389 5
- آذر 1389 3
- آبان 1389 6
- مهر 1389 7
- شهریور 1389 6
- خرداد 1389 1
- اردیبهشت 1389 3
- اسفند 1388 7
- بهمن 1388 10
- دی 1388 11
- آذر 1388 7
- آبان 1388 17
- آذر 1387 1
- آبان 1387 9
- مهر 1387 5
- شهریور 1387 1
- مرداد 1387 3
- تیر 1387 7
- خرداد 1387 5
- اردیبهشت 1387 1
- فروردین 1387 3
- اسفند 1386 3
- بهمن 1386 9
- دی 1386 19
- آذر 1386 19
- آبان 1386 7
تقویم
آبان 1404| ش | ی | د | س | چ | پ | ج |
| 1 | 2 | |||||
| 3 | 4 | 5 | 6 | 7 | 8 | 9 |
| 10 | 11 | 12 | 13 | 14 | 15 | 16 |
| 17 | 18 | 19 | 20 | 21 | 22 | 23 |
| 24 | 25 | 26 | 27 | 28 | 29 | 30 |
جستجو
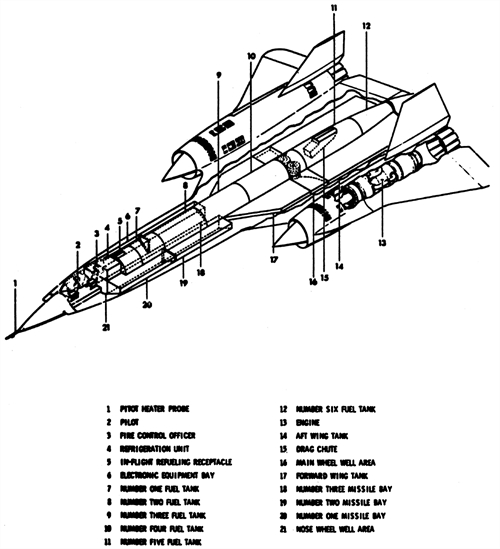
هواپیماهای شگفت انگیز: SR-71 پرنده سیاه
ترجمه و تالیف: اصغر ناصری

برای مدت 24 سال از 1966 تا 1980 سیاست دفاعی آمریکا بر پایه اطلاعاتی شکل می گرفت که هواپیمای شناسایی SR-71 یا پرنده سیاه از قلمرو کشورهای بلوک شرق گردآوری می کرد. سیستم عکسبرداری و سنسورهای الکترونیکی پیشرفته آن امکان می داد بدون ورود به خاک دشمن از مناطق نظامی آن عکس تهیه نماید.
طراح این هواپیمای خارق العاده کسی نبود جز کلارنس جانسون نابغه معروف شرکت لاکهید مارتین و موسس بخش تحقیقاتی اسکانکس ورک در این شرکت. اودر سابقه کاری خود طراحی هواپیمای بلندپرواز شناسایی U-2 را داشت، هواپیمایی که خیلی زود در معرض موشک های زمین به هوای روسها قرار گرفت. اولین نمونه هواپیمای شناسایی جدید با نام A-12 در سال 1962 پرواز کرد و اولین هواپیمایی بود که توانست از مرز سرعت 3 ماخ بگذرد.
این هواپیما هنوز یک شگفتی فناوری محسوب می شود. تقریبا هر قسمتی از این هواپیما در نوع خود یک نوآوری است. برای ایستادگی در برابر حرارتی که درنتیجه اصطکاک با هوای طبقات بالایی جو به هنگام حرکت با سرعت بالای 3 ماخ پدید می آید، پرنده سیاه نیاز به گروهی از مواد خاص مانند سوخت، آب بندها، روانکارها و سیم کشی هایی داشت که بتوانند در دماهای بالا کارکرد خود را حفظ کنند. نود و سه درصد بدنه این هوایما از آلیاژ تیتانیوم ساخته شده است که به این هواپیما امکان می دهد در دماهایی بین 230 درجه سانتی گراد در قسمت میانی بدنه تا بیش از 500 درجه سانتی گراد در ناحیه نزدیک به خروجی اگزوز موتور فعالیت کند. شیشه کابین خلبان از نوع مخصوصی است که دماهای بین 20 تا 330 درجه سانتی گراد را تحمل می کند.
دو موتور توربوجت پرات اند ویتنی J58 این هواپیما هرکدام تا 35000 پاوند نیروی رانشی تولید می کنند. این موتورها در اتاقک هایی ذدر دو بال جاسازی شده اند که قطر هریک بیشتر از قطر بدنه هواپیماست. تقریبا هر بخش از این نیروگاه پیچیده از مواد خاصی ساخته شده تا امکان تولید سرعتهای بالای سه ماخ را فراهم نمایند. در ورودی هوای موتورها یک قطعه مخروطی متحرک (spike) قرار دارد که ضمن کاستن از سرعت هوای ورودی به موتور، در سرعت های بالای 1.6 ماخ به داخل حرکت می کند تا هوای بیشتری برای موتورها فراهم کند.
این هواپیمای شناسایی فوق العاده به علت هزینه های سنگین عملیاتی در 1998 برای همیشه بازنشسته شد. امروزه بیشتر عملیات شناسایی نزدیک توسط هواپیماهای بدون سرنشین انجام می شود.
نرخ صعود یک هواپیما
در دانش هوانوردی، نرخ صعود یک هواپیما یا rate of climb به سرعت عمودی آن یا به عبارتی سرعت تغییر در ارتفاع هواپیما گفته می شود. این سرعت معمولا بر حسب فوت بر دقیقه یا متر بر ثانیه بیان می گردد.
قدرت موتورهای هواپیما نسبت به وزن آن و شکل آیرودینامیکی آن از عوامل تعیین کننده در سرعت صعود هستند. رکورددار سرعت صعود میگ 29 فولکروم روسی است که می تواند در هر ثانیه 330 متر بر ارتفاع خود بیافزاید. هواپیماهای جنگنده مدرن مانند F-15 و F-16 دارای سرعت های صعودی در حدود 250 متر بر ثانیه هستند. هواپیماهای روسی معمولا موتورهای قدرتمندتری دارند زیرا تاکید طراحان هواپیمای جنگی در روسیه بر قدرت بالا و مانورپذیری فوق العاده است.
از نظر تاریخی هواپیمای F-104 Starfighter که در سال 1958 وارد خدمت نیروی هوایی آمریکا شد، دارای سرعت صعودی استثنایی بالغ بر 244 متر بر ثانیه بود. سریعترین هواپیمای جت آن زمان نصف این مقدار نیز سرعت عمودی نداشت.

پایین ترین سرعت صعود به هواپیماهای ملخی سنگین مربوط می شود. به عنوان مثال سی 130 هرکولس دارای سرعت صعود 9 متر بر ثانیه است.
موشک بالستیک ضد کشتی چین
به تازگی چین بکارگیری موشک های دوربردی را آغاز کرده است که توانایی هدف قراردادن ناوهای هواپیمابر آمریکا را دارند. تصویر زیر چگونگی عملکرد این سلاح تهاجمی را نشان می دهد:
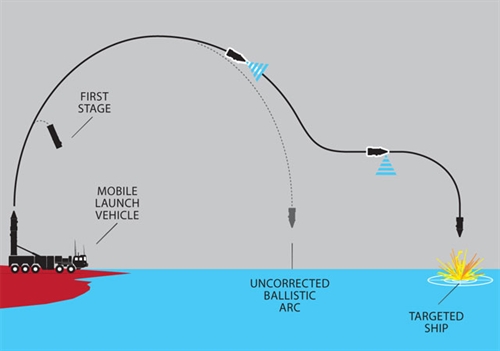
هشدار دهنده ترین سلاحی که چین برای ممانعت از دستیابی آمریکا به آبهای شرق و جنوب چین ابداع کرده، موشک بالستیک ضدکشتی (ASBM) است که می تواند یک ناو هواپیمابر در حال حرکت را هدف قرار دهد. این موشک که بر روی یک خودروی پرتاب کننده متحرک نصب می شود دو مرحله ای است و در مسیر پرواز خود از جو خارج می شود. سپس در مرحله ورود مجدد به داخل جو زمین از بالههای خود برای مانور دادن با سرعت بالای صوت استفاده می کند. سرجنگی این موشک مجهز به راداری است که با پردازش پالس های متعدد ارسال شده هدف را پیدا می کند. سپس جستجوگر مادون قرمز آن در مرحله پایانی بر روی هدف قفل می کند تا بتواند آنرا مورد اصابت کشنده قرار دهد.
موشک ضدکشتی چین با نام DF-21D که ناتو آنرا با نام CSS-5 می شناسد، حدود 3000 کیلومتر برد دارد و توسط دو ماهواره نظامی معروف چین اطلاعات لازم برای تقرب به هدف را دریافت می کند. این موشک در سال 2006 مورد آزمایش قرار گرفته است و نخستین موشک بالستیک ضدکشتی دنیا محسوب می شود.

از سوی دیگر مجهز بودن به رادار یک خطر بالقوه برای موشک بوجود می آورد و آن امکان منحرف کردن موشک با فریب دهنده های راداری یا Decoy می باشد.
منابع :
1. Popular Mechanics
2. WikiPedia
تکنولوژی رادارگریز
ترجمه و تلخیص: اصغر ناصری
رادارگریزی (Stealth) به عمل پنهان شدن یا گریختن از دید رادار و وسایل آشکارساز گفته میشود. رادارگریزی بیش از اینکه یک تکنولوژی باشد، یک مفهوم است که گستره وسیعی از تکنولوژی ها و ویژگی های طراحی را در بر می گیرد. به عنوان یک مفهوم، رادارگریزی چیز جدیدی نیست. اولین بار در جنگ جهانی دوم زیردریایی ها از روکش های ویژه ای بر روی پریسکوپ های خود استفاده کردند تا از دید رادارها بگریزند.
در مورد هواپیماها، رادارگریزی به معنی پنهان شدن در برابر آشکار سازی توسط رادار است. پس از جنگ دوم جهانی برخی طراحان هواپیما و استراتژیست ها نیاز به طراحی هواپیمایی که خط اثر راداری (radar signature) کوچکی داشته باشد را احساس کردند (یک خط اثر راداری بزرگی اثری است که یک هواپیما بر روی صفحه رادار در یک زاویه و مسافت مشخص بجای می گذارد. از خط اثر راداری اغلب به سطح مقطع راداری یا radar cross section یاد می شود). ولیکن به مدت چندین سال، توانایی آنها برای پنهان شدن از رادار به دلایل متعددی محدود بود. یک محدودیت عمده، ناتوانی طراحان هواپیما در تعیین نحوه دقیق انعکاس امواج رادار از روی هواپیما بود.
در قرن نوزدهم فیزیکدان اسکاتلندی جیمز کلرک ماکسول یک سری فرمولهای ریاضی ابداع کرد که نحوه تفرق و بازتابش تشعشع الکترومغناطیسی از روی یک شکل هندسی معین را پیش بینی می کرد. این معادلات بعدا توسط دانشمند آلمانی آرنولد یوهان زومرفلد تصحیح شدند. اما برای مدتی طولانی، حتی پس از آنکه طراحان هواپیما سعی کردند خط اثر رادار در هواپیماهایی مانند U-2 و A-12 را در انتهای دهه 1950 کاهش دهند، بزرگترین مانع در برابر موفقیت آنان فقدان مدلهای نظری درباره نحوه بازتاب امواج از روی یک صفحه بود. در دهه 1960 دانشمند روسی پیوتر اوفیمتسوف معادلاتی برای پیش بینی بازتاب امواج الکترومغناطیسی از اشکال دو بعدی ساده ابداع کرد. کارهای او بدست دانشمندان آمریکایی نیز رسید.
در سالهای ابتدایی دهه 1970 تعدادی از طراحان و دانشمندان آمریکایی به این نتیجه رسیدند که می توان با نظریات علمی موجود هواپیمایی با سطح مقطع راداری کاهش یافته تولید کرد. شرکت هواپیمایی لاکهید تحت قراردادی با آژانس پروژه های تحقیقاتی پیشرفته دفاعی، بزودی کار بر روی جنگنده رادارگریز F-117 را آغاز نمود.

F-117 Nighthawk
طراحان هواپیما سطح مقطع راداری یک هواپیما را بر حسب دسیبل متر مربع اندازه گیری میکنند. این معیار، بازتاب پذیری امواج رادار از سطح هواپیما را با یک کره آلومینیومی با اندازه معین مقایسه می کند. بمب افکن B-2 بنا به گزارشات سطح مقطع راداری برابر با یک تیله آلومینیومی دارد. شکاری F-22 نیز سطح مقطع راداری در همین حدود دارد در حالیکه این پارامتر در مورد F-117 کمی بزرگتر است، یعنی F-17 نسبت به این هواپیماها کمتر رادارگریز است. جنگنده نوین F-35 سطح مقطع راداری در حد یک توپ گلف آلومینیومی دارد. بمب افکن قدیمی تر B-1 اثری معادل یک توپ آلومینیومی یک متری بر صفحه رادار میگذارد در حالی که بمب افکن بی 52، یک هواپیمای غول پیکر غیر رادارگریز اثری معادل یک توپ کروی عظیم با قطر 50 متر بر صفحه رادار میگذارد بنابراین براحتی در صفحه رادار قابل آشکارسازی است.

B-2 Spirit
مهندسین در طراحی یک هواپیمای رادارگریز سعی میکنند بدنه هواپیما را طوری طراحی کنند که امواج راداری را جذب یا متفرق کند تا به گیرنده های دشمن بازنگردند. جذب امواج رادار با مواد ویژه پوششی یا بطریق بدام انداختن امواج در داخل سازه هواپیما انجام می شود. تفرق امواج نیز با طراحی هوشمندانه بدنه هواپیما انجام می شود. بعضی از قسمت های هواپیما بازتاب کننده های خوبی برای امواج رادار هستند. برای مثال کابین خلبان امواج رادار را مستقیما بسوی منبع ارسال کننده بر می گردانند. بنابراین باید کابین های خلبان بدقت طراحی شوند و با مواد جاذب امواج پوشش داده شوند. ورودی های موتور نیز باید طوری طراحی شوند که امواج ردار به تیغه های توربین نرسند بلکه در داخل ورودی با انعکاس های متوالی بدام افتد. سطوح دم بجای عمودی بودن با زاویه های تند ساخته می شوند تا امواج رادار را در جهات مخالف منبع آن پراکنده کنند.

طراحی خاص دم ها و کابین جنگنده F-22
مرجع اصلی:
http://centennialofflight.gov/essay/Evolution_of_Technology/Stealth_tech/Tech18.htm
کنترل پرواز در هواپیما
برای کنترل هواپیمای در حال پرواز، خلبان از سطوح کنترل پرواز استفاده می نماید. سطوح کنترل پرواز شامل انواع زیر هستند:
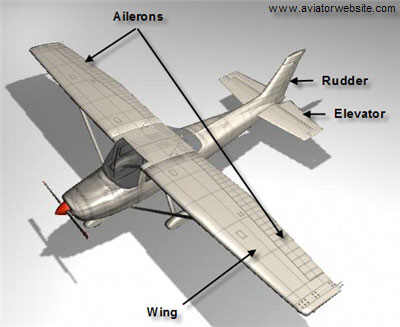
1. آیلیرون ها
در هر طرف بال یک آیلیرون (Aileron) قرار دارد. با چرخاندن اهرم پرواز به سمت چپ و راست این سطوح به حرکت در میآیند.
حرکت آیلیرون ها شکل بال را عوض کرده و در یک طرف انحنای بیشتری بوجود میآورد. در نتیجه در سمتی که آیلیرون به بالا خم شده نیروی پسای (drag) بیشتری به سمت پایین بوجود آمده و بطور عکس در سمت مقابل نیروی بالابرنده بیشتر میشود. در نتیجه هواپیما به پهلو می چرخد.
آیلیرون ها با قطعه متحرک شکان عمودی (رادر) بطور هماهنگ حرکت کرده و باعث چرخش هواپیما می شوند. این موضوع به گردش سرپیچ یک خودرو می ماند. اگر جاده شیبی به جهت مرکز انحنای جاده داشته باشد، بطوری که خودرو در هنگام گردش به پهلو خم شود، دور زدن آسانتر صورت میگیرد.

گردش هواپیما به پهلو برای دور زدن آسانتر
عملی که هواپیما به هنگام حرکت دادن آیلیرونها انجام می دهد غلتش یا roll نام دارد.
2. رادر
رادر (Rudder) یک سطح کنترلی روی دم است.
خلبان با فشار روی پدالهای رادر آنرا به حرکت در میآورد. با فشار دادن پدال چپ رادر به سمت چپ چرخیده و دم به سمت راست حرکت می کند. فشار روی پدال راست عکس این واکنش را بدنبال دارد.
حرکت رادر باعث گردش نوک هواپیما به چپ یا راست می شود.
حرکت رادر باعث عملی به نام Yaw می شود.
3. بالابرها (Elevetors)
بالابرها روی دم های افقی قرار دارند. حرکت دادن بالابر باعث بالا یا پایین رفتن نوک هواپیما میشود و صعود یا نزول هواپیما را موجب میشود.
خلبان با کشیدن اهرم پرواز به سمت خود یا هل دادن آن به جلو باعث حرکت بالابرها می شود.
حرکت دادن بالابرها باعث بالا و پایین رفتن دم شده و نوک هواپیما نیز از این حرکت تبعیت می کند.
حرکتی که هواپیما به هنگام جابجایی بالابر انجام می دهد Pitch نام دارد.
سه حرکت چرخشی یک هواپیما
منبع اصلی:
1. http://www.aviatorwebsite.com/education/control-surfaces.php
2. http://quest.arc.nasa.gov/aero/virtual/demo/aeronautics/tutorial/